1.2.2 Memoria.
Una memoria es un dispositivo que puede mantenerse en por lo menos dos estados estables por un
cierto periodo de tiempo. Cada uno de estos estados estables puede utilizarse para representar un bit. A
un dispositivo con la capacidad de almacenar por lo menos un bit se le conoce como celda básica de.
memoria
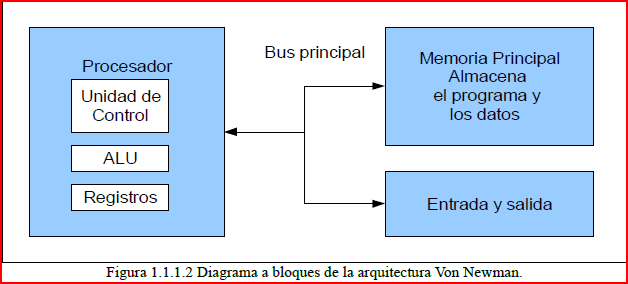
Un dispositivo de memoria completo se forma con varias celdas básicas y los circuitos asociados para
poder leer y escribir dichas celdas básicas, agrupadas como localidades de memoria que permitan
almacenar un grupo de N bits. El número de bits que puede almacenar cada localidad de memoria es
conocido como el ancho de palabra de la memoria. Coincide con el ancho del bus de datos. Uno de los
circuitos auxiliares que integran la memoria es el decodificador de direcciones. Su función es la de
activar a las celdas básicas que van a ser leídas o escritas a partir de la dirección presente en el bus de
direcciones. Tiene como entradas las n lineas del bus de direcciones y 2N lineas de habilitación de
localidad, cada una correspondiente a una combinación binaria distinta de los bits de direcciones. Por
lo tanto, el número de localidades de memoria disponibles en un dispositivo (T) se relaciona con el
número de lineas de dirección N por T= 2N . MEMORIA RAM
MEMORIA RAM MEMORIA ROM
MEMORIA ROM MEMORIA CACHE
MEMORIA CACHE
1.2.2.1 Arquitecturas.
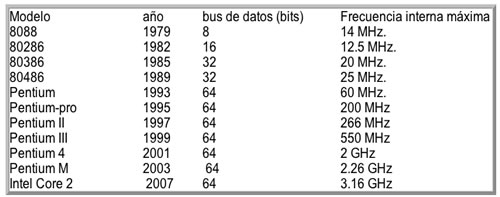
Desde hace unas decenas de años, los procesadores han estado aumentando su velocidad de operación a
un paso mucho más rápido que las memorias, lo que ha llevado a la situación en que los procesadores
actuales operan mucho más rápidamente que la memoria principal de las computadoras. Esto hace que
el procesador tenga que quedarse detenido por varios ciclos de reloj (estados de espera) cada vez que
tiene que leer o escribir a la memoria principal.
Para aliviar un poco esta situación conservando el precio de la computadora razonablemente bajo, se ha
organizado a la memoria como una jerarquía de diversos niveles con distintos tamaños y velocidades.
Hay que recordar que la memoria más rápida es mucho más cara que la más lenta y que por lo tanto, es
menor la cantidad de memoria de este tipo que se puede usar. Esta estructura jerárquica se ilustra en la
figura 1.2.2.1. De esta manera, la mayor parte de la capacidad de almacenamiento de la maquina se
encuentra en el disco duro, que tiene un costo por Gbyte muy bajo, pero que también es muy lento
debido a que hay que mover piezas mecánicas para leer o escribir en él. En seguida se encuentra la
memoria principal, que normalmente es del tipo RAM dinámica. Es en esta memoria donde se
almacenan los programas para que los pueda ejecutar el procesador, así como los datos con que
trabajan dichos programas. Con el objetivo de mejorar la velocidad del procesador al ejecutar ciclos y
al leer repetidamente datos de uso común, se coloca una pequeña cantidad de memoria RAM estática
entre el procesador y la memoria principal. Esta memoria es conocida como memoria cache y guarda
una copia de una pequeña región de la memoria principal, para que si se requiere volver a leer los datos
almacenados en esta región de memoria, no se tenga que esperar a que se lea la memoria principal, que
es mucho más lenta que la cache y que el procesador. Finalmente, en la cima de la jerarquía, se
encuentran los registros del procesador que aunque son muy pocos, son los que se pueden leer y
escribir más rápidamente.
Menor tamaño, Mayor Velocidad
Registros del
procesador
Memoria Cache
Memoria principal
Disco Duro
Menor velocidad, mayor tamaño
1.2.2.2 Tipos.
Los diversos tipos de memorias se clasifican como memorias volátiles y memorias no volátiles. Las
memorias volátiles pierden la información que almacenan al momento en que se les desconecta la
energía, mientras que las no volátiles conservan su contenido aunque no estén alimentadas.
Las memorias volátiles son conocidas desde las primeras computadoras como memorias de acceso
aleatorio (RAM), ya que en esa época las memorias volátiles eran de acceso secuencial. Dentro de las
memorias volátiles se encuentran las subclases RAM Dinámica y RAM Estática.
Las memorias no volátiles conservan sus datos a pesar de que en este conectadas el voltaje del
alimentación. De hecho pueden conservar sus datos por un periodo de tiempo relativamente largo,
usualmente entre cien y 200 años. Conforme evolucionado la tecnología, se han desarrollado diversas
familias de rumores no volátiles, entre las cuales se encuentran: la memoria de solo lectura (ROM -
Read only Memory), la memoria de solo lectura programable (PROM -Programable Read only
Memory), la memoria de solo lectura programable y borrable (EPROM - Erasable Read only Memory),
la memoria de solo lectura programable y borrable eléctricamente (EEPROM Electricaly Erasable Read
only Memory) y la memoria flash.
1.2.2.3 Características.
En cuanto a las memorias volátiles, la memoria RAM dinámica es muy rápida pero muy cara. En
contraste, la memoria RAM estática es muy barata pero muy lenta.
En general, las memorias no volátiles son baratas y su precio depende sobre todo de su capacidad de
almacenamiento. Algunas de estas tecnologías son consideradas obsoletas y por lo tanto casi no son
utilizadas en actualidad.
1.2.2.4 Funcionamiento.
El tipo más común de memorias volátiles es la RAM dinámica, que utiliza la capacitancia parásita de
los transistores MOSFET con los que esta construida para almacenar un bit. Como solo se requiere de
un transistor por celda de memoria, esta memoria es muy económica, pero debido al tiempo que toma
cargar la gran capacitancia de los transistores con los que esta construida, es muy lenta.
El otro tipo de memoria RAM utilizado en la actualidad, es la RAM estática. Esta memoria se
construye con el mismo tipo de transistores con los que se construyen los procesadores, por lo que
pueden operar a una velocidad similar a la del procesador. Sin embargo, como se requieren alrededor
de 8 transistores por bit, el costo de esta memoria es mucho más alto que el de la RAM dinámica.
Selección de renglon I/O de columna
En cuanto a las memorias no volátiles, En cuanto a las memorias no volátiles, históricamente han
existido varios tipos. Los primeros sólo podían ser leídos, por lo que fueron conocidos como memorias
de solo lectura (ROM - Read Only Memory). A pesar de que los tipos más modernos permiten que su
contenido se ha modificado por el usuario, aún son conocidos como memorias de solo lectura.
En las memorias de solo lectura originales (ROM), el almacenar en uno o un cero, depende de si el
fabricante colocó o no un diodo físicamente en el circuito de la memoria. De esta manera, el contenido
de la memoria queda establecido por el fabricante desde el momento de su construcción y no es posible
que el usuario no modifique. Sin embargo, este tipo de memoria es aún muy usada debido a que es muy
económica y por lo tanto, ideal para la producción en masa de muchos artefactos de consumo masivo.
Con el objetivo de hacer a la memoria de solo lectura un dispositivo más versátil, algunos fabricantes
de memorias sustituyeron a los diodos por fusibles semiconductores que el usuario podía quemar
usando un programador especial. Esto permitió a los usuarios tener dispositivos de memoria de solo
lectura cuyo contenido ellos mismos podían programar, por lo que estos dispositivos fueron conocidos
como memorias de solo lectura programables (PROM - Programable Read Only Memory). El único
inconveniente que presentaban estas memorias era que si se necesitaba hacer un pequeño cambio, debía
descartarse a la memoria ya programada y utilizar un dispositivo nuevo en blanco.
Este problema pudo eliminarse al sustituir los fusibles semiconductores por transistores con una
compuerta flotante que les permitía almacenar una carga eléctrica por un tiempo muy grande. Esta
compuerta flotante permite almacenar una carga eléctrica que reduce el voltaje que debe ser aplicado a
la compuerta principal para hacer que el rector conduzca. De esta manera, aplicando un voltaje de
prueba a la compuerta principal y observando si el transistor conduce, se puede saber si un transistor no
tiene carga en su compuerta flotante (está borrado o almacena un uno) o sí (estaba programado o
almacena un cero).
La primera generación de dispositivos que utilizó esta tecnología, conocidos como memorias de solo
lectura programables y borrables (EPROM), podían grabarse eléctricamente aplicando un voltaje más
alto de lo normal a la compuerta principal. Sin embargo, para eliminar la carga tendría que aplicarse
una luz ultravioleta intensa al dispositivo, lo cual eliminaba la carga almacenada en la compuerta
flotante. Para realizar este proceso de borrado era necesario retirar al dispositivo del circuito de
aplicación y colocarlo en el borrador de luz ultravioleta por aproximadamente media hora .
En la segunda generación de dispositivos de memoria que utilizaban transistores con compuertas
flotante se logró eliminar la carga eléctricamente, con lo que dichos dispositivos se volvieron más
versátiles. Los dispositivos de esta generación se conocieron como memorias de solo lectura
programables y borrables eléctricamente (EEPROM). Como cada byte de la memoria podía ser borrado
de forma independiente, requerían de muchos circuitos auxiliares para permitir este tipo de borrado, lo
que aumentaba su costo.
Para la tercera generación, se buscó reducir el costo de los dispositivos reduciendo la cantidades
circuitos auxiliares necesarios para el borrado. Esto se logró permitiendo únicamente el borrado de
bloques de memoria de tamaño relativamente grande. También se buscó almacenar más de un bit por
celda de memoria controlando la cantidad de carga almacenada en cada celda, de manera que con ocho
voltajes discretos se pueden representar las ocho combinaciones correspondientes a tres bits. Los
dispositivos de esta generación son conocidos como memorias FLASH.